











![]() 고객센터 공지사항
고객센터 공지사항
-----------------------------------------------------------------------------
ㅇ교육 커리큘럼 구성(NVIDIA 플랫폼 기반 자율주행차 구현을 위한 SW개발 및 프로젝트)
주차 | 커리큘럼 | 세부 내용 |
1주(32h) | C프로그래밍 기법 | • 데이터의 표현과 연산 • 연산자, 제어문, 함수 • 배열, 포인터, 함수 • 문자열, 변수, 포인터 배열 • 동적할당 함수, 구조체와 유사형 • 파일 입출력, 전처리 지시자, 분할 컴파일 |
2주(32h) | 임베디드 C 코딩 활용 | • 임베디드 시스템 이해, 개발 환경, 컴파일의 정체 • 데이터 타입, 기본 연산자, 하드웨어 제어 연산자 및 실습 • 배열, 함수, 포인터 • 배열, 함수, 포인터의 관계 • 하드웨어 제어 방식 이해, Keypad 제어 실습 |
3주(32h) | C++ 프로그래밍 | • 기본적인 C++의 입출력, 이름공간 • 함수 오버로딩, 기본 인수, Const변수, 포인터, 반환 • 참조변수, new, delete, 구조체와 동적할당 • 객체지향 프로그래밍 개념, 클래스 선언, 분할 컴파일 • 객체 포인터, 동적 객체, 객체 배열, 참조 객체 • 디폴트 생성자, 복사 생성자 • 연산자 오버로딩, 프렌드 관계, 특별한 클래스 멤버 • 포함, 상속, 템플릿, 예외 처리 |
4주(32h) | 파이썬 프로그래밍 및 활용 | • 파이썬 프로그래밍 개요, 정수형, 실수형, 문자형, 문자열형 데이터의 처리, 자료형변환 • 숫자를 사용한 연산, RAW 입력, 논리표현 사용, 반복문 • 함수의 선언, 사용자 정의 함수, 함수, 이름공간과 모듈, 메서드와 프로그램 논리, 파일 위치 열기, 읽기, 이진 파일 저장 • try문과 finally문, 리스트, 집합, 딕셔너리 • 시간 객체와 시뮬레이션, 그래픽 유저 인터페이스(GUI), 이벤트 처리기 제어, 사운드 재생 및 음량 조절, 제어 |
5주(32h) | 차량용 프로세서 활용 및 디바이스 제어 | • 개발환경 구축 • GPIO 출력, 입력 제어 • 타이머 시간 제어, 인터럽트 입력 제어 • UART 통신, 블루투스 통신 제어 • ADC입력, PWM 출력 제어 • ARM Assembly, Startup code 분석 • 시스템초기화, C Run-Time Startup, Memory Controller, NAND Flash Controller • I/O Ports / UART, PWM Timer, RTC • WDT, IIC/IIS, Interrupt Controller, Vectored Interrupt Controller • SW DMA, Timer DMA, ADC 특성 및 활용, Touch Screen Interface • Touch LCD, Palletized LCD, Non-Palletized LCD Controller Audio PCM Data, Audio device제어, AC97 설정 및 응용 |
6주(32h) | 자율주행 기능 구현을 위한 차량용SW개발 | • Electric control system, SW build system, Automotive SW development environment • C language overview, AURIX C programming, AURIX assemble language • Automotive device control, Device control practice |
7주(32h) | 차량용 OS 및 디바이스 개발 | • 리눅스 개요 • 임베디드 리눅스 개발 환경 구축 • 파일 연산 및 프로세스 개념 • 시그널, SysV IPC, 쓰레드 개념, 동기화 • 디바이스 드라이버 개요 • 커널서비스와 모델 • 캐릭터 디바이스 • 블록 디바이스 |
8주(32h) | ||
9주(32h) | 자율주행 개발을 위한 컴퓨터비전 | • OpenCV 개요 • 영상처리 준비, 화소 다루기, 컬러 처리 • 히스토그램으로 화소 세기, 형태학 연산으로 영상변환 • 영상 필터링, 선, 외곽선, 성분 추출, 관심점 검출 • 투영관계 추정, 3D장면 재구성, 비디오 시퀀스 처리 |
10주(32h) | 자율주행 개발을 위한 visualization Nvidia TX보드를 활용한 딥러닝의 이해 | • QT 프로그래밍 기본 • QT 프로그래밍 응용 • QML과 C++연동하기 • QT 멀티 쓰레드 |
• Neural Network • Deep Learning • Python Basic 실습 • Tensorflow 실습 • Machine Learning 실습 • Deep Learning 실습 • Tensorflow 도제학습 실습 | ||
11주(32h) | Digits서버와 Nvidia TX기반의 영상처리 딥러닝 | • CNN 의 소개와 활용, 인공신경망의 개요 딥러닝 프레임워크 (Caffe, tensorflow, digits, cudnn) DIGITS Image Classification • CNN 기초 개념, 구조, Alexnet, lenet, • DIGITS Object Detection • Localization, Detection, Image Segmentation CNN 실습, • Training Neural Network, Deployment with TX1실습 • CuDNN 을 이용한 MNIST with TX1 실습 • TensorRT 을 이용한 MNIST with TX1 실습 • RNN-LSTM 을 이용한 word2vec with TX1 실습 |
12주(32h) | Drive PX2 기반 딥러닝을 활용한 ADAS개발 | • Drive PX2 와 Driveworks SDK 소개와 활용 방안 • Driveworks PDK 와 샘플을 활용한 실습 카메라를 이용한 Object Detection 실습 • CNN 기반 Object Detection 이론 및 training 실습 Matlab 을 이용한 카메라 캘리브레이션 • 칼만필터와 차량 제어로직과 Matlab 실습 자율주행을 위한 센서 퓨전 방안 • CAN 통신 시뮬레이션을 이용한 ACC 구현과 실습 • training된 Object Detection 모델의 DrivePX2 Deployment 실습 |
13주(32h) | 자율주행 상황인지를 위한 Tensorflow Object Detection | • CNN 영상 분석 이론 • Tensorflow Test 환경 설정 • Object Detection 이론 (Fast RCNN / Yolo / SSD) • Kitti Dataset 소개, tfrecord 생성 변환 실습 • Yolo 트레이닝 및 실습 • SSD 트레이닝 및 TensorBoard 모니터링 • Training 결과 배포 및 PB 만들기 • Object Detection 테스트 : Open CV 로 이미지 파일 / 영상 파일 보기 실습 • Cuda 와 TensorRT 를 이용한 SSD with TX1 실습 |
14주(32h) ~ 15주(16h) | 모터제어와 ROS/SLAM, 딥러닝 기술 적용 | • 전동기의 원리 • 토크제어 • BLDC 전동기 • 교류전동기의 회전 원리 • 전동기의 모델링 • ROS 소개 및 노드작성 • ROS의 이해와 딥러닝 활용 • ROS/SLAM 기술 구현 |
15주(16h) ~ 16주(32h) | 센서퓨전을 활용한 자율주행 기술 구현 | • 라이다 센서 퓨전 - 클러스터링, 세그멘테이션, 필터링 • 레이다 센서 퓨전 • 카메라 센서 퓨전 • 칼만필터 • 자율주행모형차 활용 개발 환경 구축 • 모터 제어를 이용한 차량의 driving 제어 실습 • Usb 카메라를 이용한 차선인식과 주행 실습 • TX1 의 Object Detection 모델 inference • Lidar 를 이용한 대상과의 거리 측정 실습 • 장애물 충돌을 피하기 위한 긴급 제동 구현과 테스트 • RNN-LSTM 기반의 앞차와의 거리 상황인지 • 장애물을 피하기 위한 경로 생성 알고리즘 실습 |
1주~24주 (6개월) | 자율주행차 구현을 위한 플랫폼 구축 및 S/W 개발 | • 프로젝트 구현, 개발 • 팀별 분석결과 보고서 작성 • 팀별 리허설 발표와 파이널 수정·보완 • 팀별 프로젝트 발표회외 피드백 |
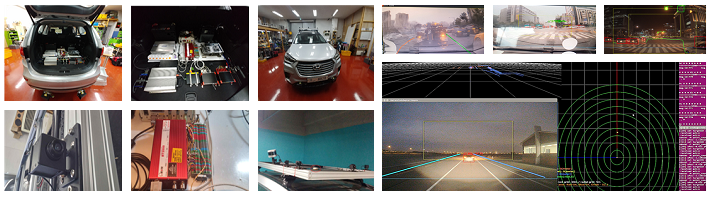
ㅇ산학연계 팀 프로젝트 - 자율주행 기술적용을 위한 자율주행 알고리즘 개발 - 영상처리 및 센서제어를 통한 자율주행모형차 (레이싱카, 기능카) 구현 및 개발 - 기업체 선행 프로젝트(지능형 로봇 개발 등) | ||
총 24주, 960시간(교육 512시간, 프로젝트 448시간) | ||
다음글 △ [무료과정] IoT 임베디드 시스템 SW 개발자 양성과정 교육생 모집
이전글이 없습니다.





한컴아카데미
13493 경기도 성남시 분당구 대왕판교로 644번길 49, 한컴타워 3층 TEL. 031-622-7779
사업자등록번호 : 729-81-01695 대표자: 김종헌
Copyright 2024. Hancom Inc. All rights reserved.





![한컴아카데미 [무료교육] 자율주행SW 개발전문가 교육생모집](http://www.saraminimage.co.kr/recruit/bbs_recruit2/hcmds_title_200409.png)